With this project we will manage a buzzer, using the FTDI FT232H development board (of which there is a dedicated page on this site) and the NXP PCA9685 development board (of which there is a dedicated page on this site).
This buzzer must be connected to the NXP PCA9685 development board. The connection connectors are listed below:
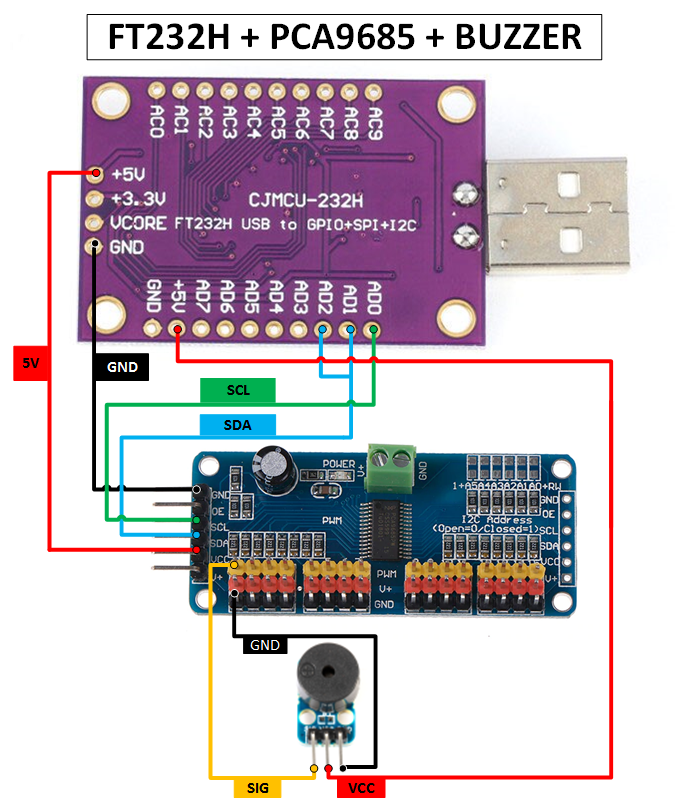
| Image | Board FT232H | Board PCA9685 | Buzzer |
|---|---|---|---|
|
AD0 | SCL | ------ |
| AD1 + AD2 | SDA | ------ | |
| +5V | VCC | ------ | |
| GND | GND | ------ | |
| ------ | Channel 0 - PWM | SIG | |
| +5V | ------ | VCC | |
| ------ | Channel 0 - GND | GND |
To manage this buzzer, the presence of the "PCA9685_FTDI" library is required.
The following Python code example plays the buzzer using different frequencies (with the same PWM), then it plays the buzzer using a range of PWM:
# Simple demo of of the PCA9685 PWM servo/LED controller library. import time # Import the PCA9685 module. import pca9685_ftdi # Initialise the PCA9685 using the default address (0x40). pwm = pca9685_ftdi.PCA9685_FTDI() # Configure min and max pulse lengths SERVOMIN = 0 # This is the 'minimum' pulse length count (out of 4096) SERVOMAX = 4095 # This is the 'maximum' pulse length count (out of 4096) FREQ_STEP = 25 PWM_STEP = 20 # our channel # counter channel = 0 print('\nPlaying buzzer on channel 0, press Ctrl-C to quit...') try: print("\nSetting several frequencies with the same PWM...") for pulselen in range(5, SERVOMAX, FREQ_STEP): pwm.set_pwm_freq(pulselen) pwm.setPWM(channel, 0, 50) time.sleep(0.5) print("\nDrive buzzer using setPWM()") for pulselen in range(SERVOMIN, SERVOMAX, PWM_STEP): pwm.setPWM(channel, 0, pulselen) time.sleep(0.5) print("\nDrive buzzer using setPWM() - Reverse Mode") for pulselen in range(SERVOMAX, SERVOMIN, -PWM_STEP): pwm.setPWM(channel, 0, pulselen) pwm.set_all_pwm(0, 0) pwm.close() except KeyboardInterrupt: # Capture keyboard ^C to exit the program print('\nYou terminated the program. The program ends!') pwm.set_all_pwm(0, 0) pwm.close()